微机原理 s6-并行接口芯片8255
微机原理
第六章
并行接口芯片8255
接口和外设交换的三种信息:数据、状态、控制
并行通信
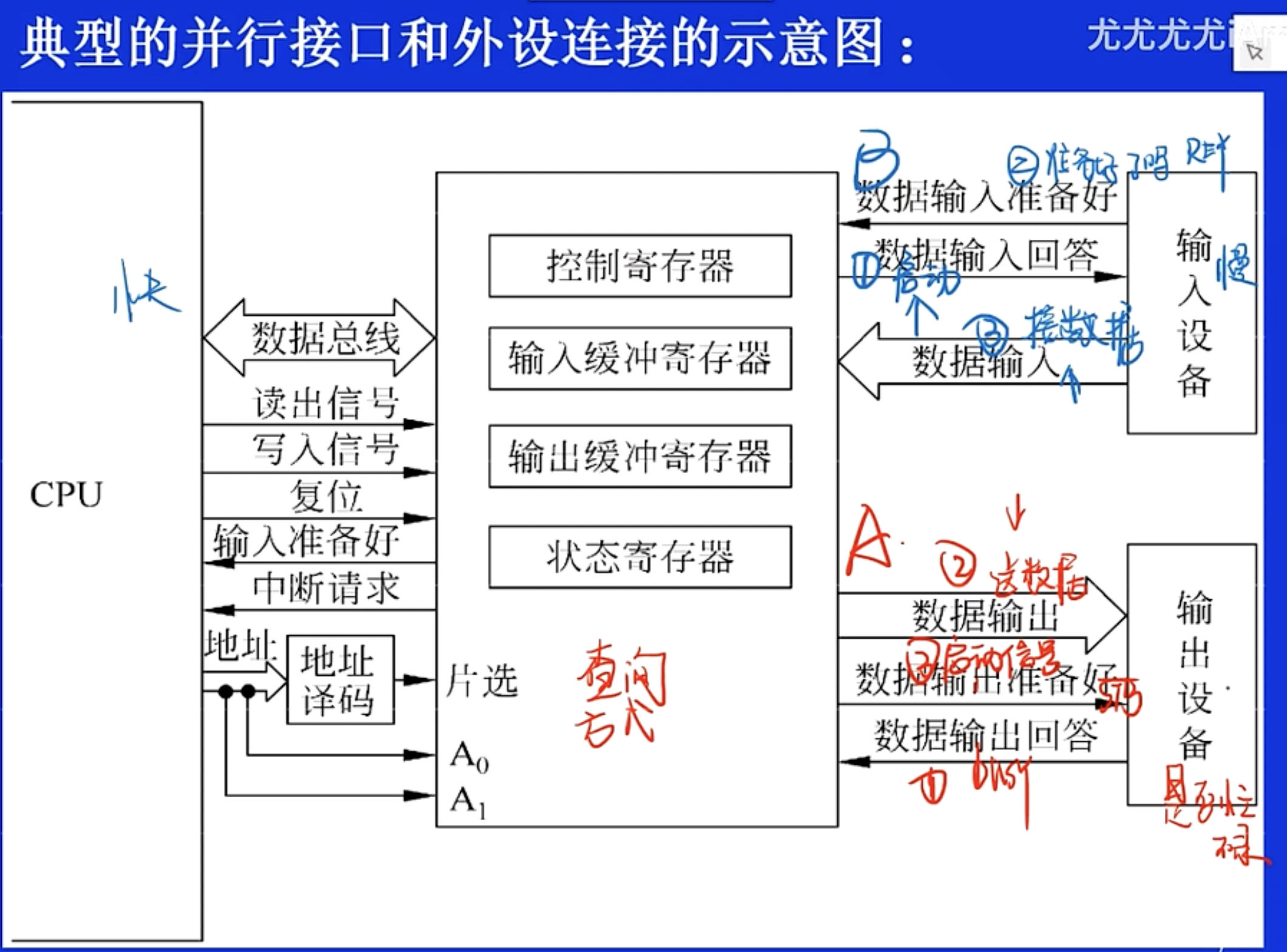
输出设备工作过程:
查询是否忙碌—送入数据—启动信号
输入设备工作过程:
启动信号—查询是否准备好—接收数据
可编程并行通信接口芯片8255A
8255A的内部结构(***)
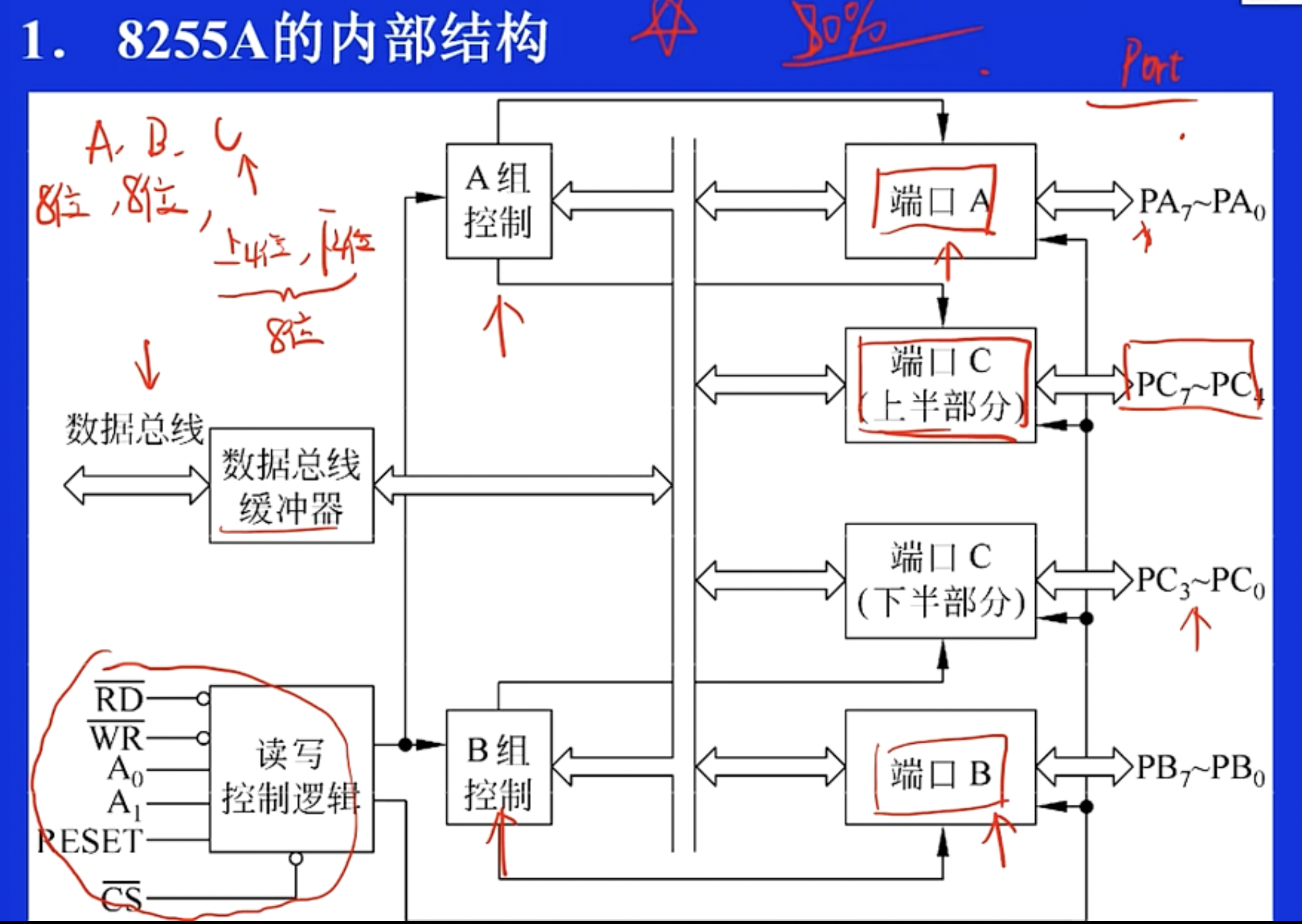
有3个8位的数据端口A、B、C
A、B、C均为8位,但端口C分上半部分(4位)和下半部分(4位)。
A组控制是端口A以及C的上半部分(高4位)。B组控制是端口B以及端口C的下半部分(低4位)。
端口A比较特殊,可应用于方式2,其他端口不可以。
端口A、B作为独立的输入或者输出端口,八位同时操作。
端口C配合端口A、B。可以按位操作,分为2个4位端口,传送控制和状态信息。
8255A的引脚及功能
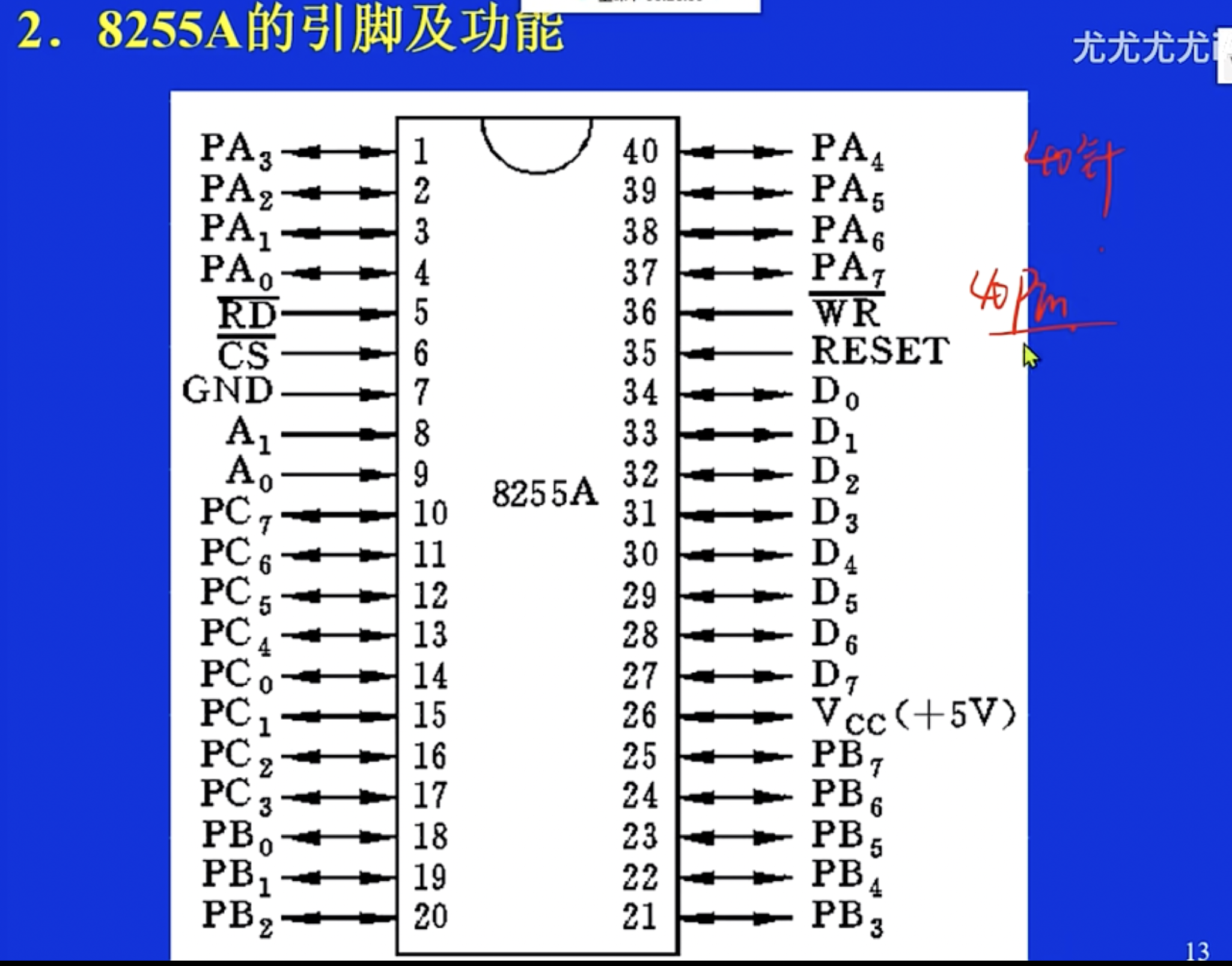
8255A的引脚为40针(pin)。
与外设相连的引脚有24个:
PA7-PA0—端口A数据线
PB7-PB0—端口B数据线
PC7-PC0—端口C数据线
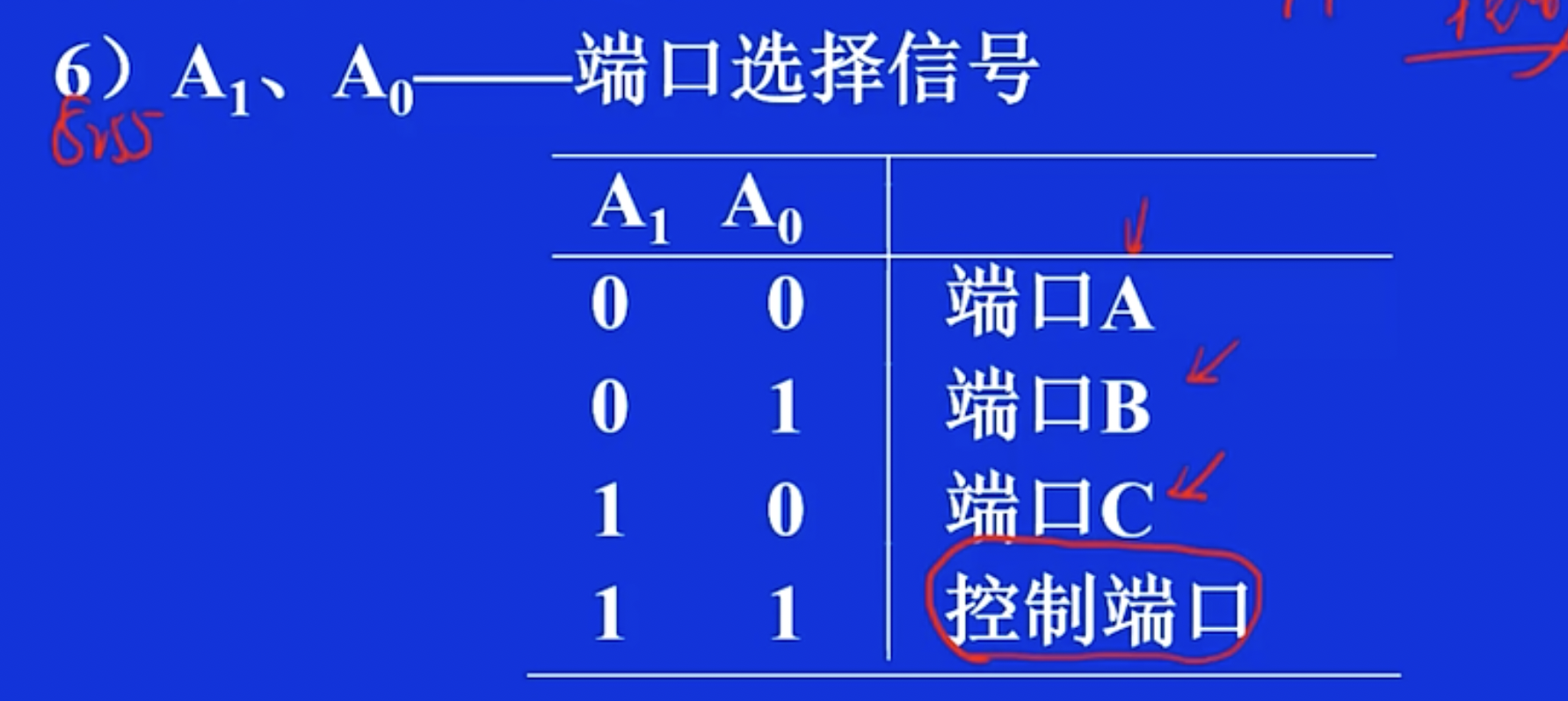
片选信号:
A1和A0同时为0选中端口A
A1为0、A0为1选中端口B
A1为1、A0为0选中端口C
A1和A0同时为1控制端口
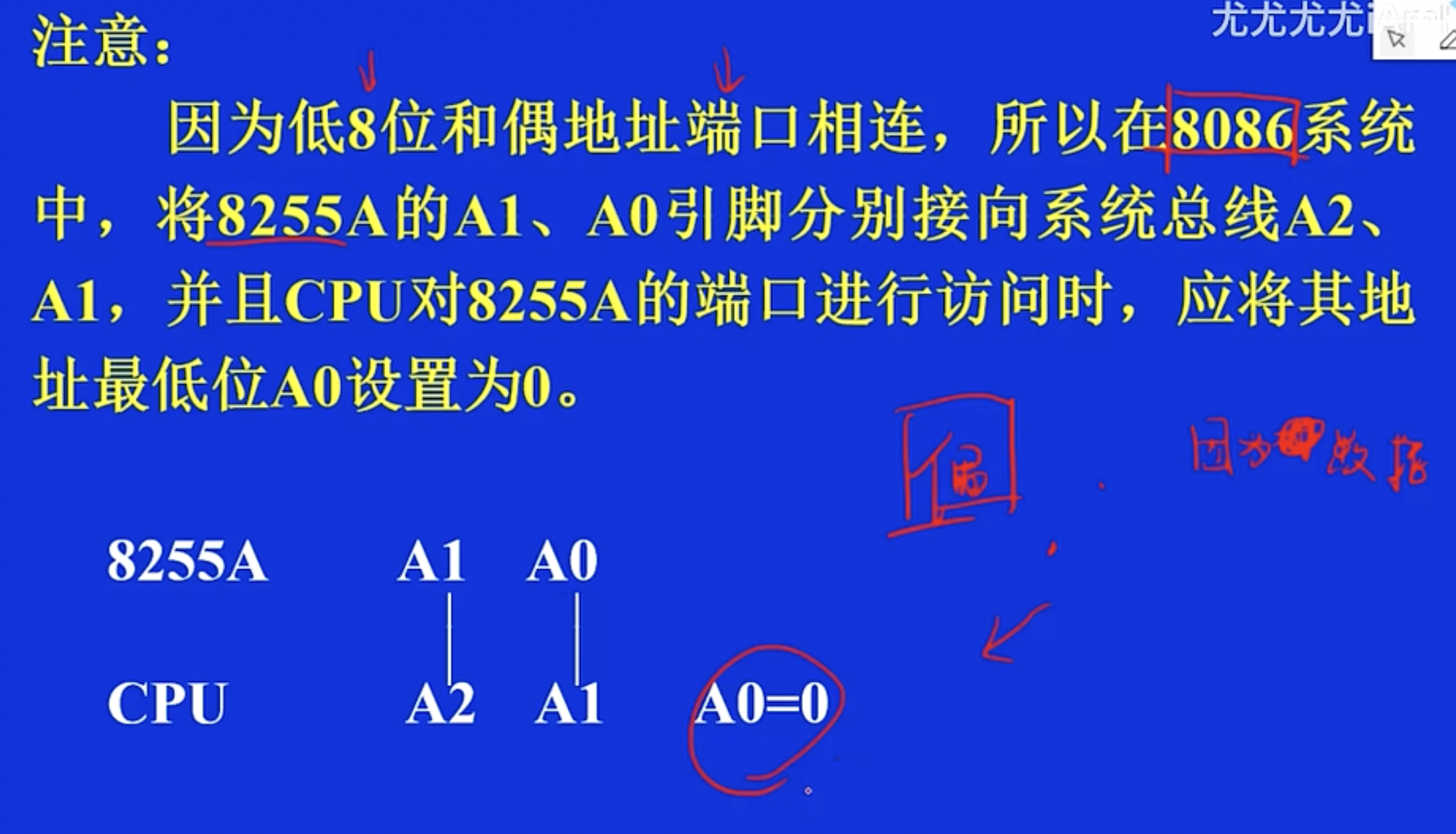
注意
8255A的控制字
控制信号和状态信号只能使用不同组。
例如:控制信号使用了端口C的上半部分(PC0-PC3)中的某位,那么状态信号只能使用端口C的下半部分(PC4-PC7)中的某位。反之同理。

8255A的控制字有两种功能:
- 各端口的方式选择控制字。(设置A、B、C端口的工作方式,输入/输出等)
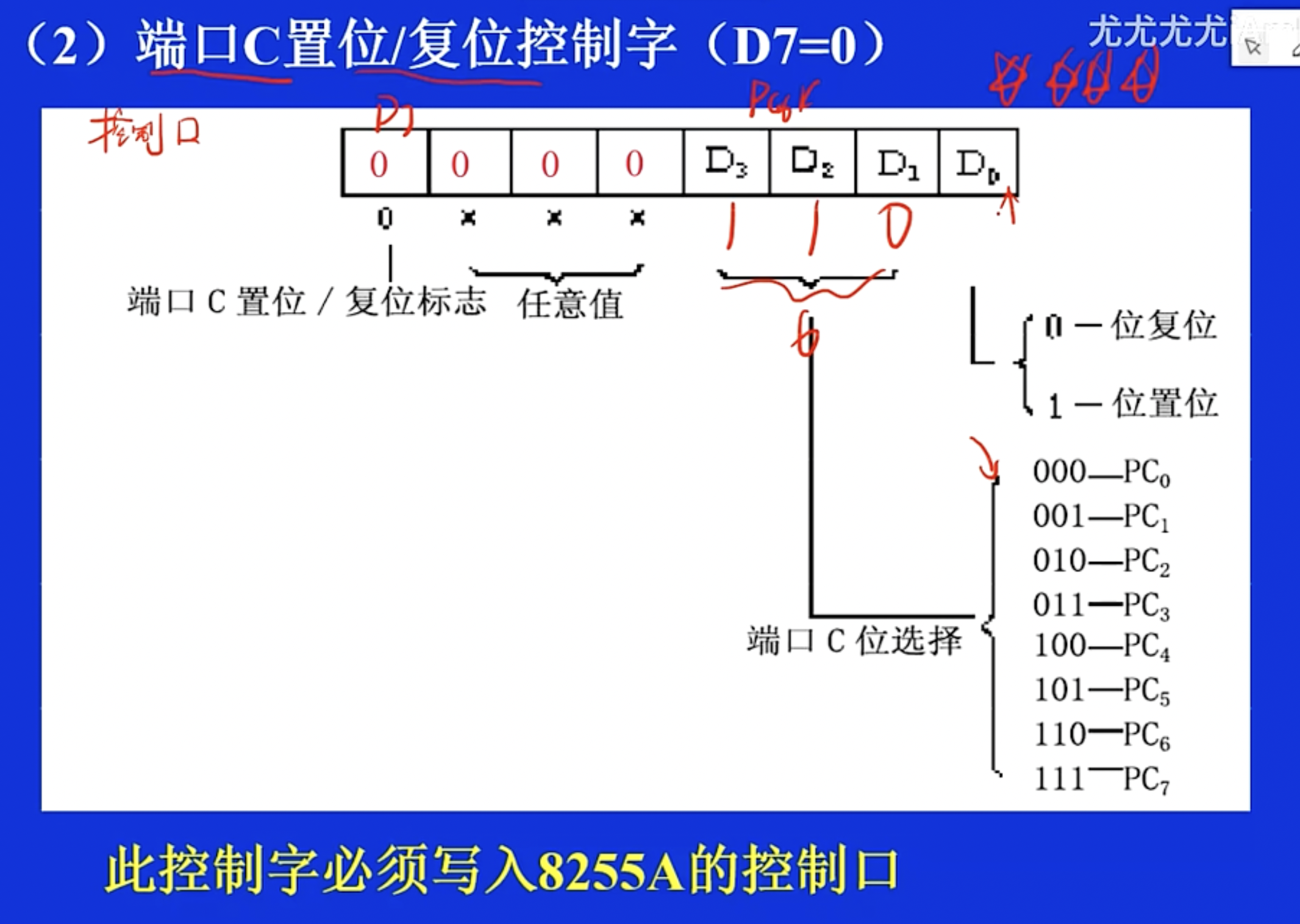
- C端口按位置1/置0控制字。(端口C按位置位/复位功能,写入的是控制口,不是C口)
方式选择控制字
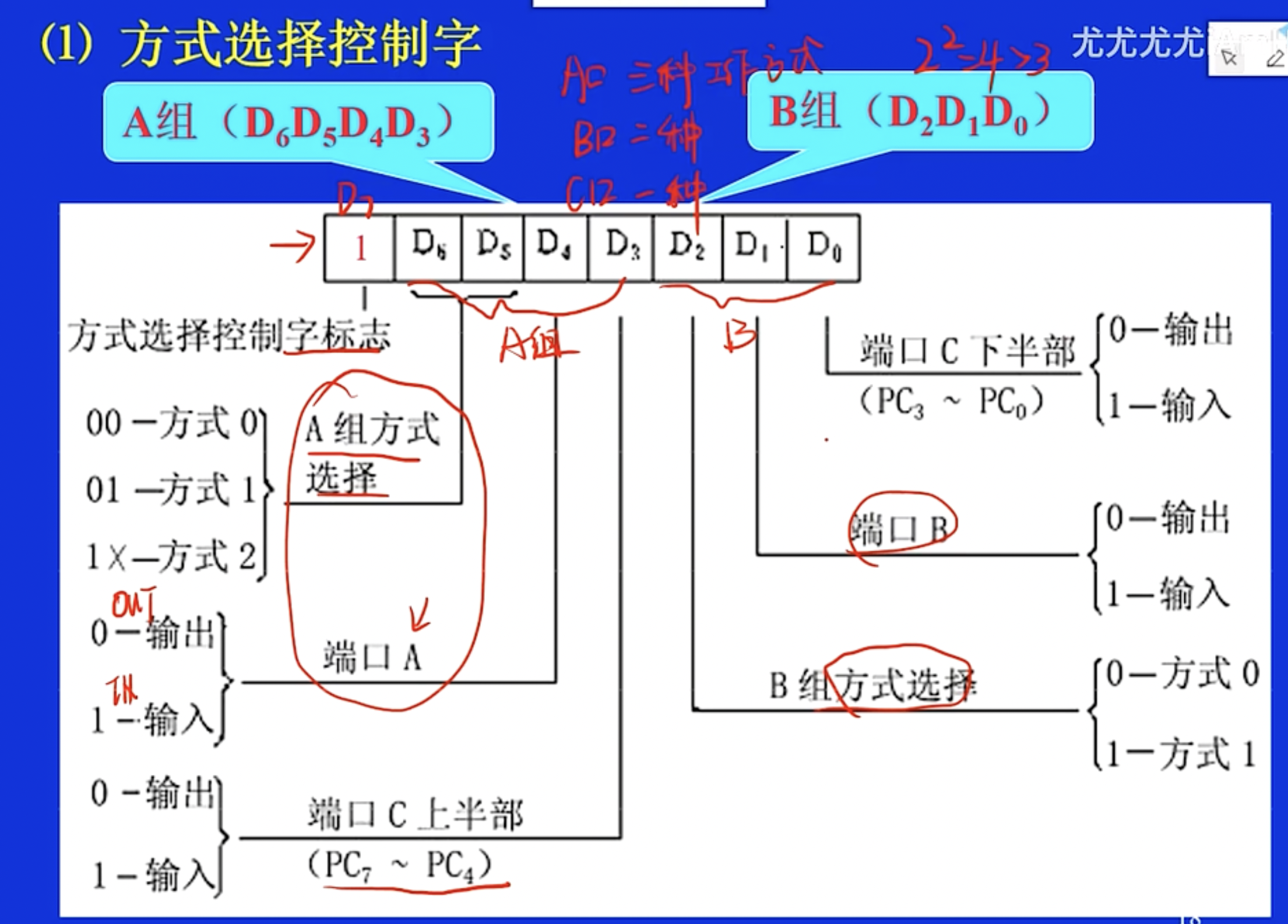
A端口有三种工作方式(方式0、1、2),B端口有两种工作方式(方式0、1),C端口只有一种(方式0)。
例题以及初始化过程
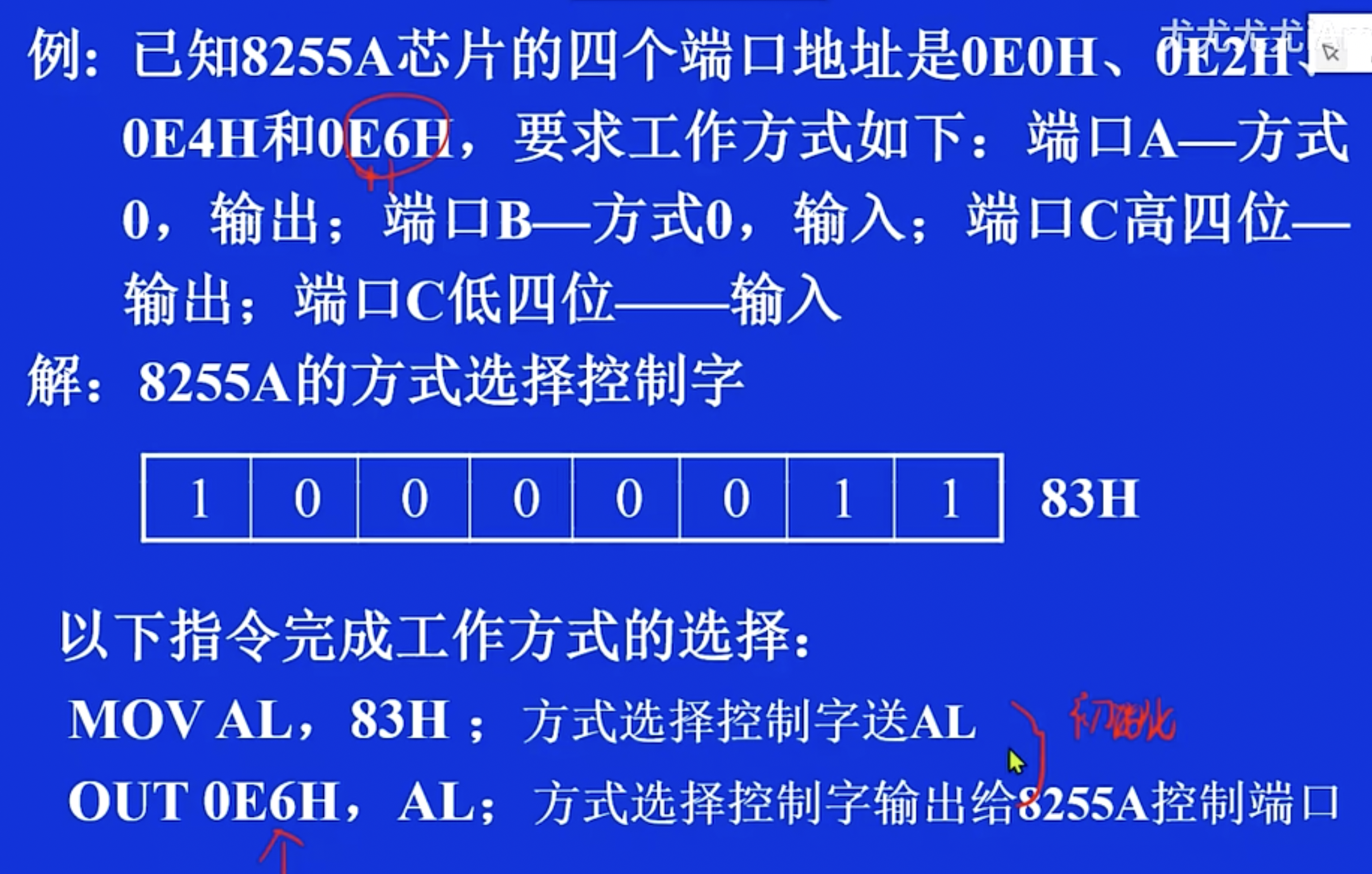
初始化过程:
MOV AL,控制字
OUT 端口地址,AL
端口C置位/复位控制字(***)
D7=0
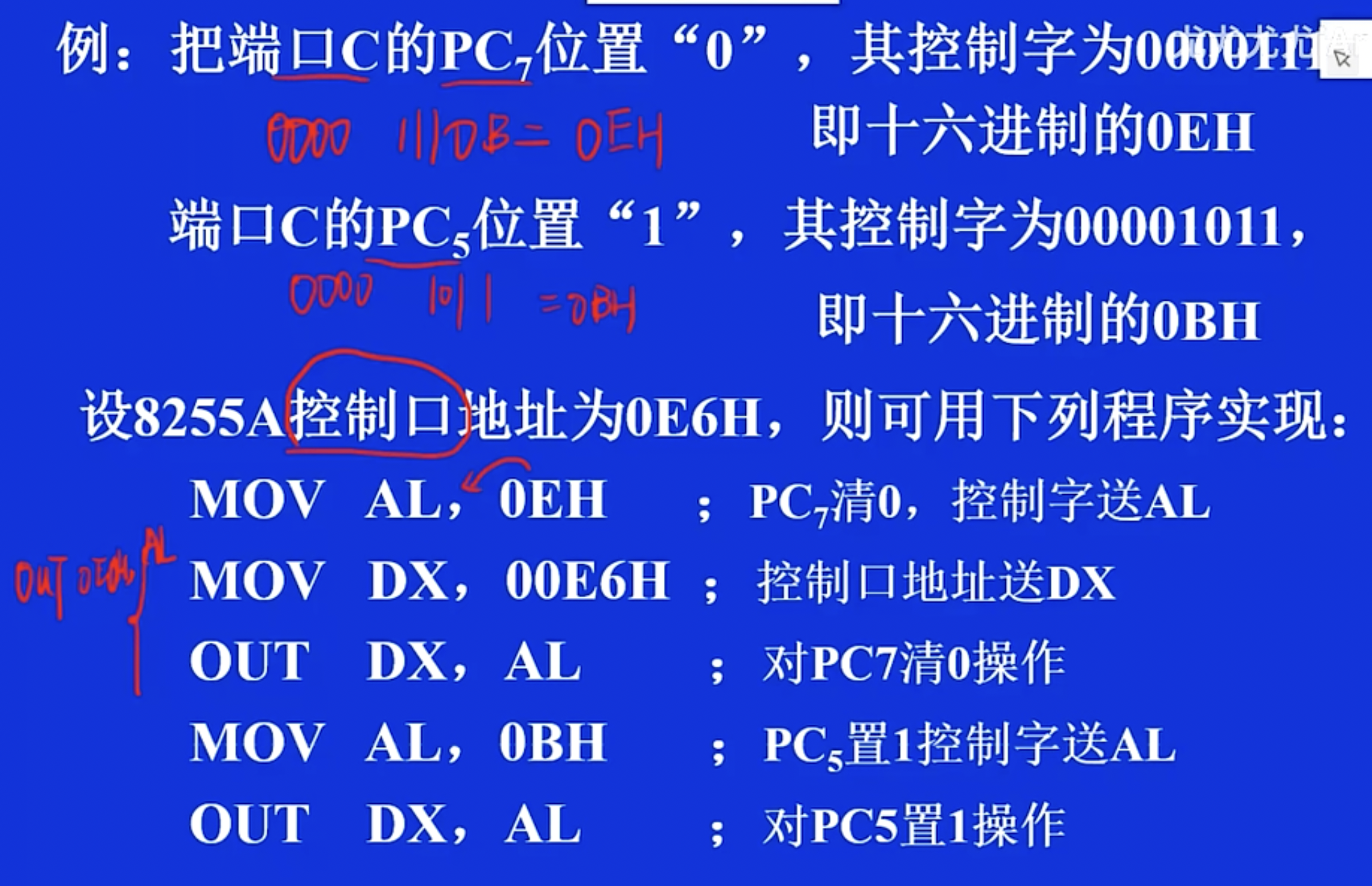
例题以及控制口代码
8255A的工作方式
方式1、2必须要有端口C的配合,且端口C是固定的,但是有端口C的不一定是方式1、2,也有可能是方式0。
方式0—基本输入/输出方式
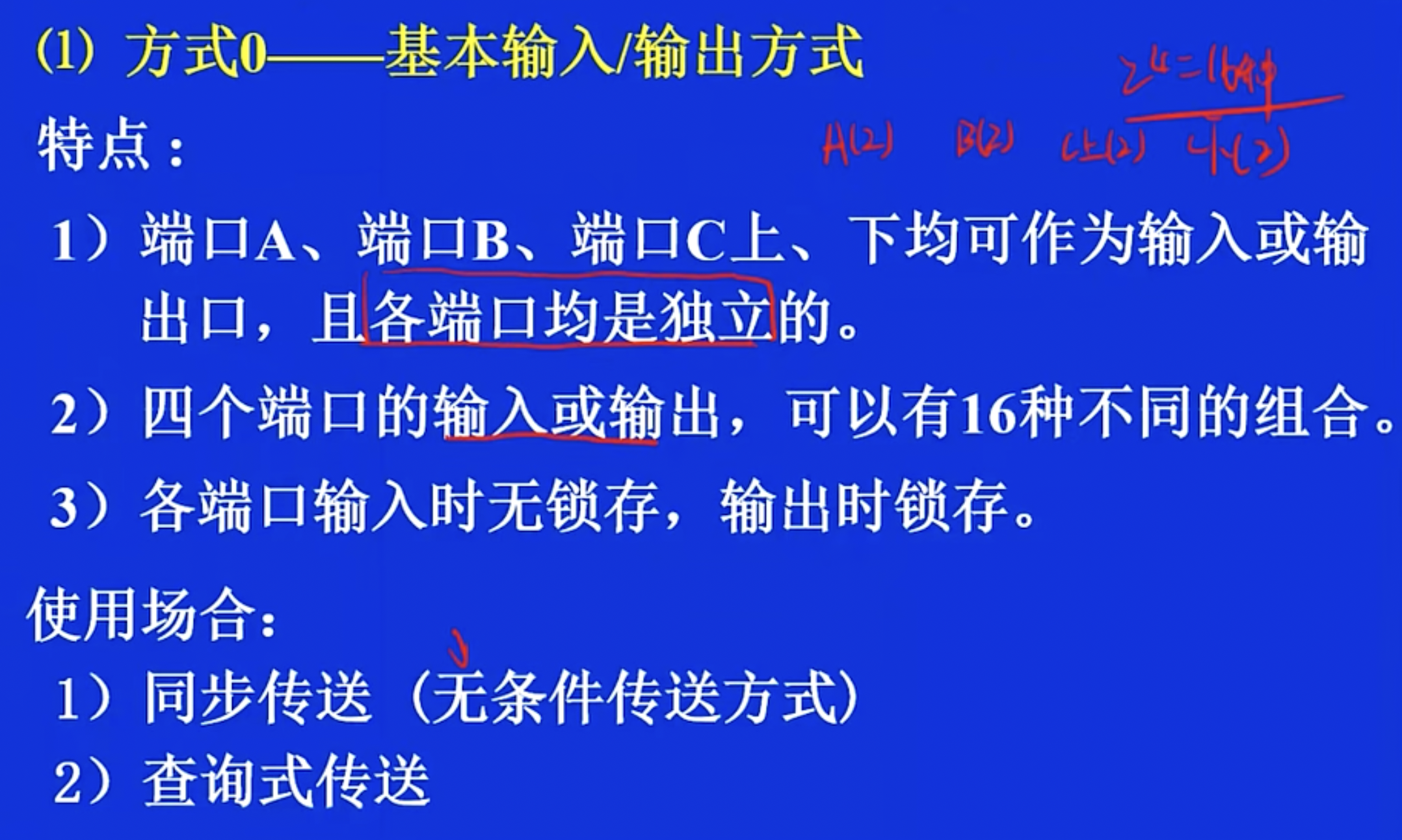
特点:
- 四个端口皆可作输入输出口,且为独立的。
- 四个端口的输入或输出,有16种不同的组合。
适用场合:同步传送(无条件传送方式)、查询式传送。
方式1—选通的输入/输出方式
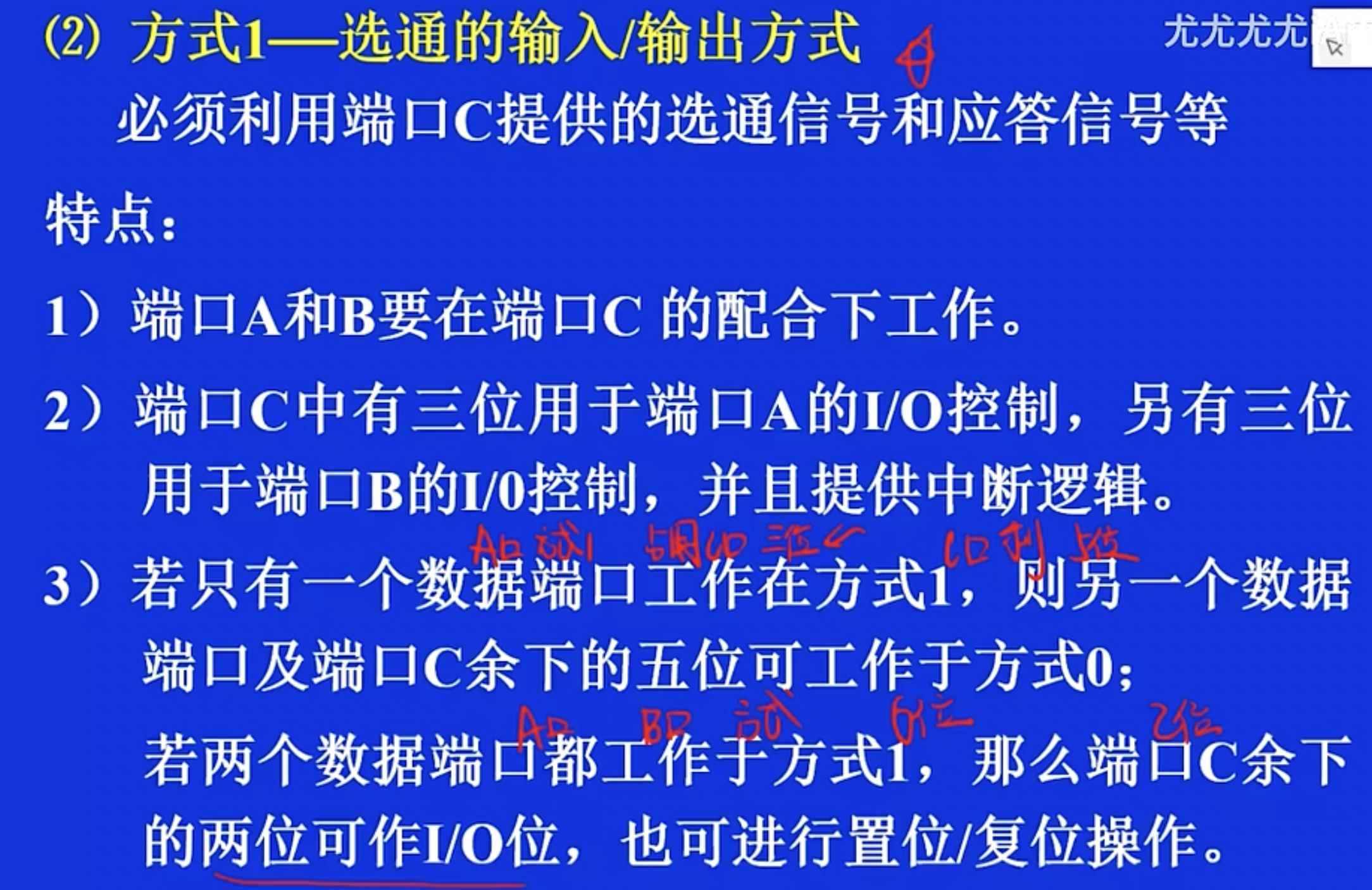
特点:端口A和B要在端口C的配合下工作。
端口C有三位用于A的I/O控制,另有三位用于B的I/O控制,并提供中断逻辑。
若只有一个数据端口工作在方式1,则另一个数据端口及端口C余下的五位可工作方式0;若两个数据端口工作在方式1,那么端口C余下的两位可作I/O位,也可进行置位/复位操作。
总结:
- 用来配合的C口固定。
- 可提供中断。
方式1输入端口对应控制信号
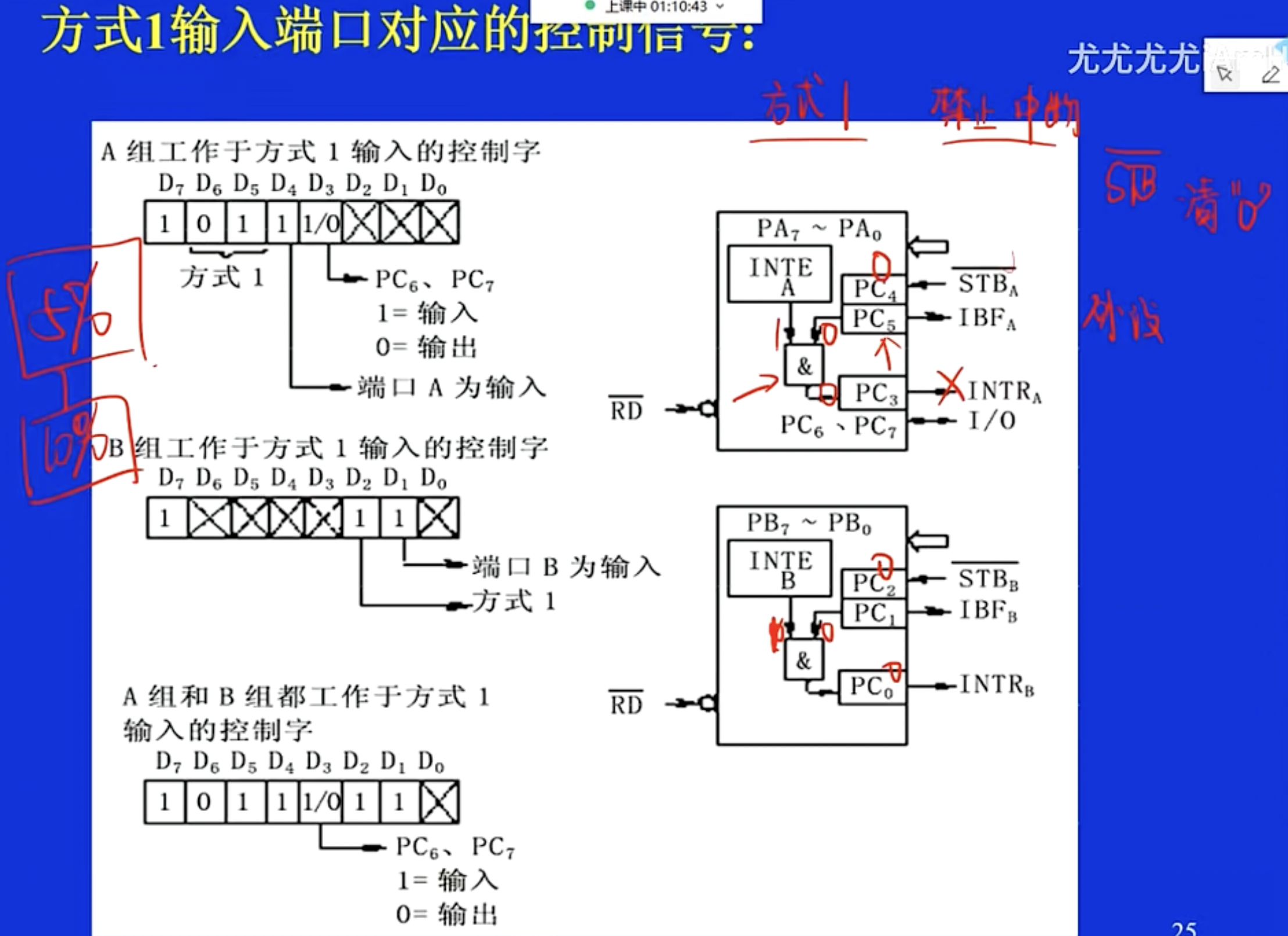
与门。
禁止中断:使STB非清0。A组为PC4,B组为PC2。
方式1输出
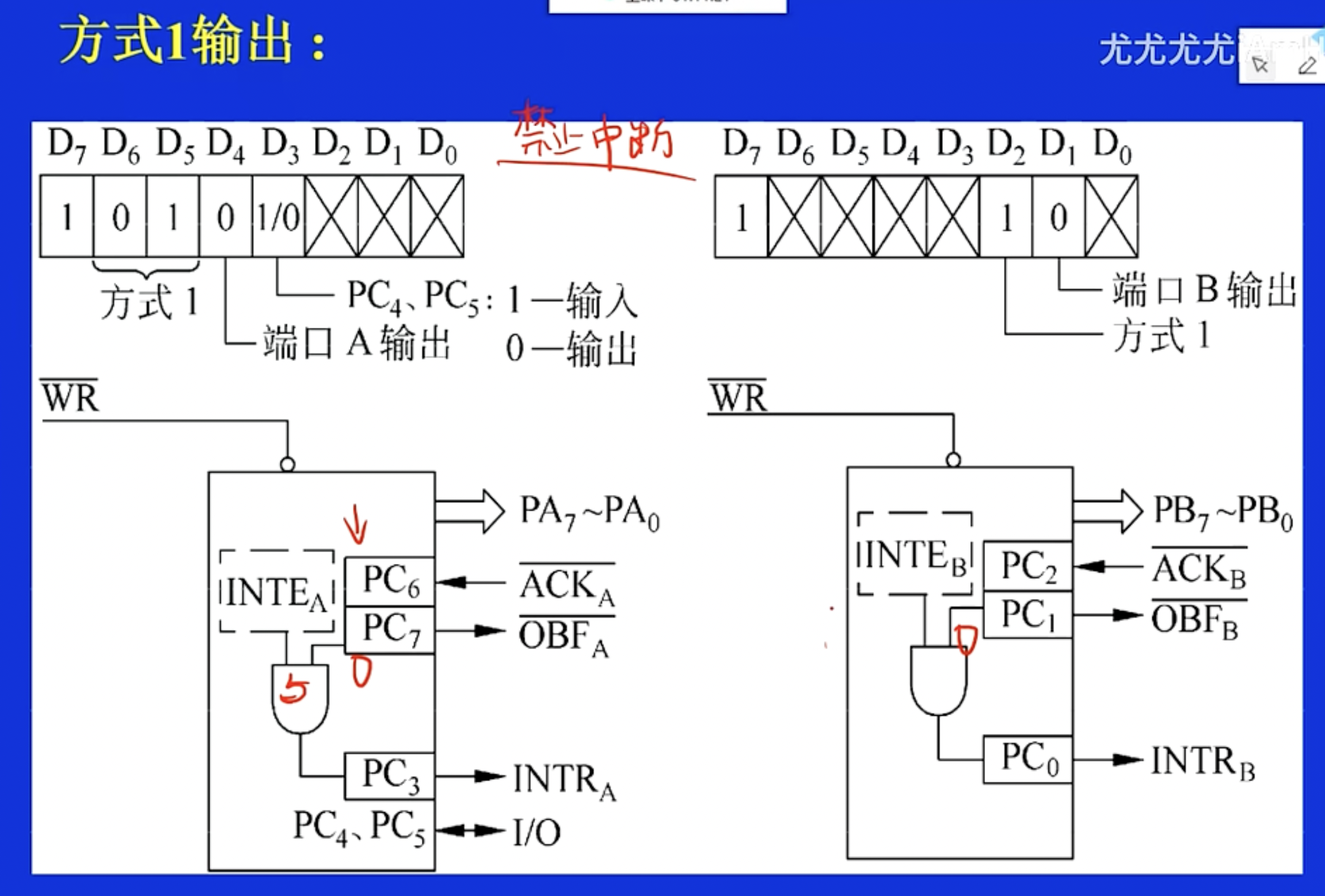
与门。
禁止中断:使ACK非清0。A组为PC6,B组为PC2。
方式2—双向传输方式
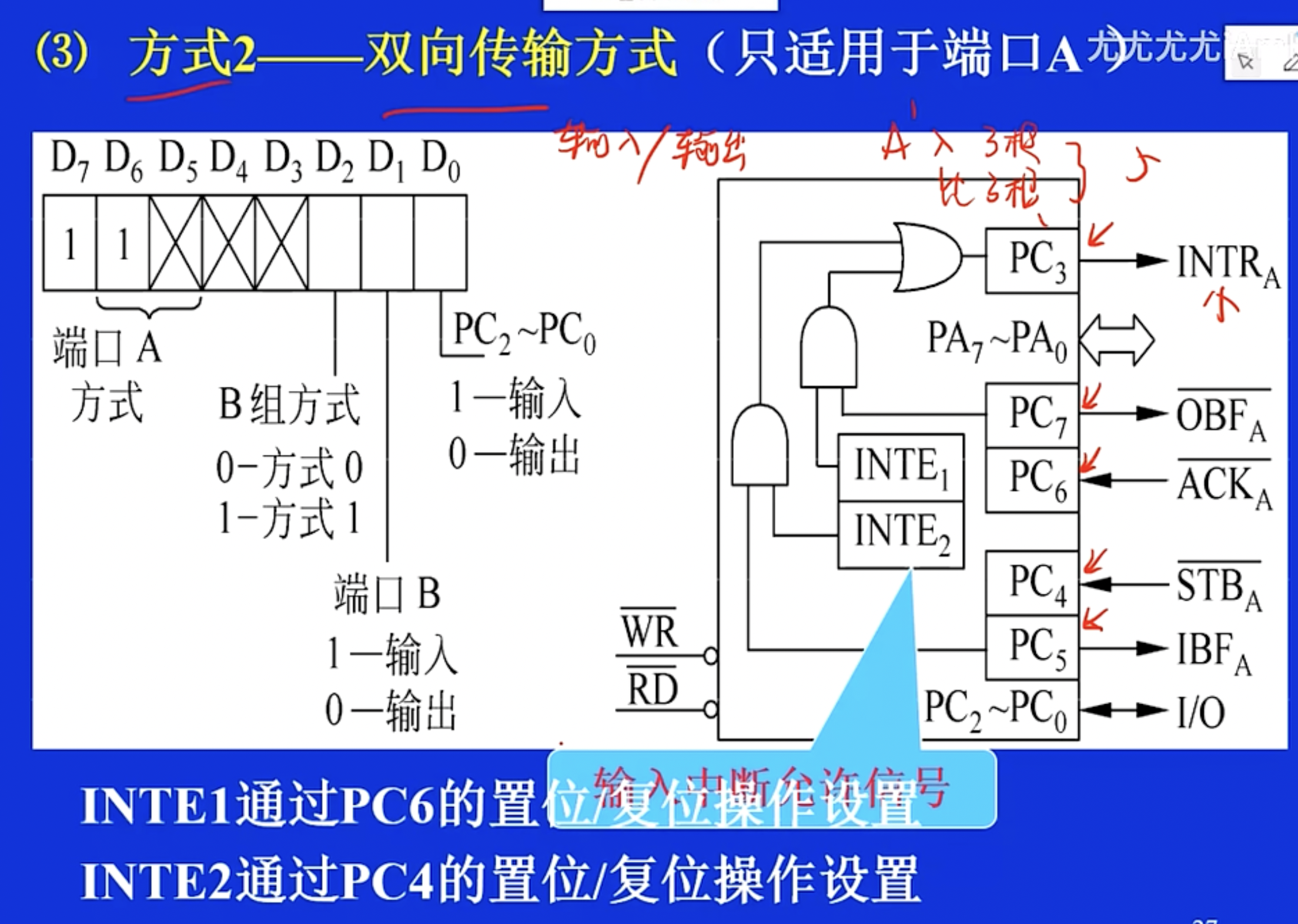
或门。
禁止中断:使ACK非清0。使PC6清0。
注意
当端口A工作于方式2时,使用的是PC3、4、5、6、7;端口B仍然可以工作于方式0或方式1,PC0、1、2。
8255A的应用举例
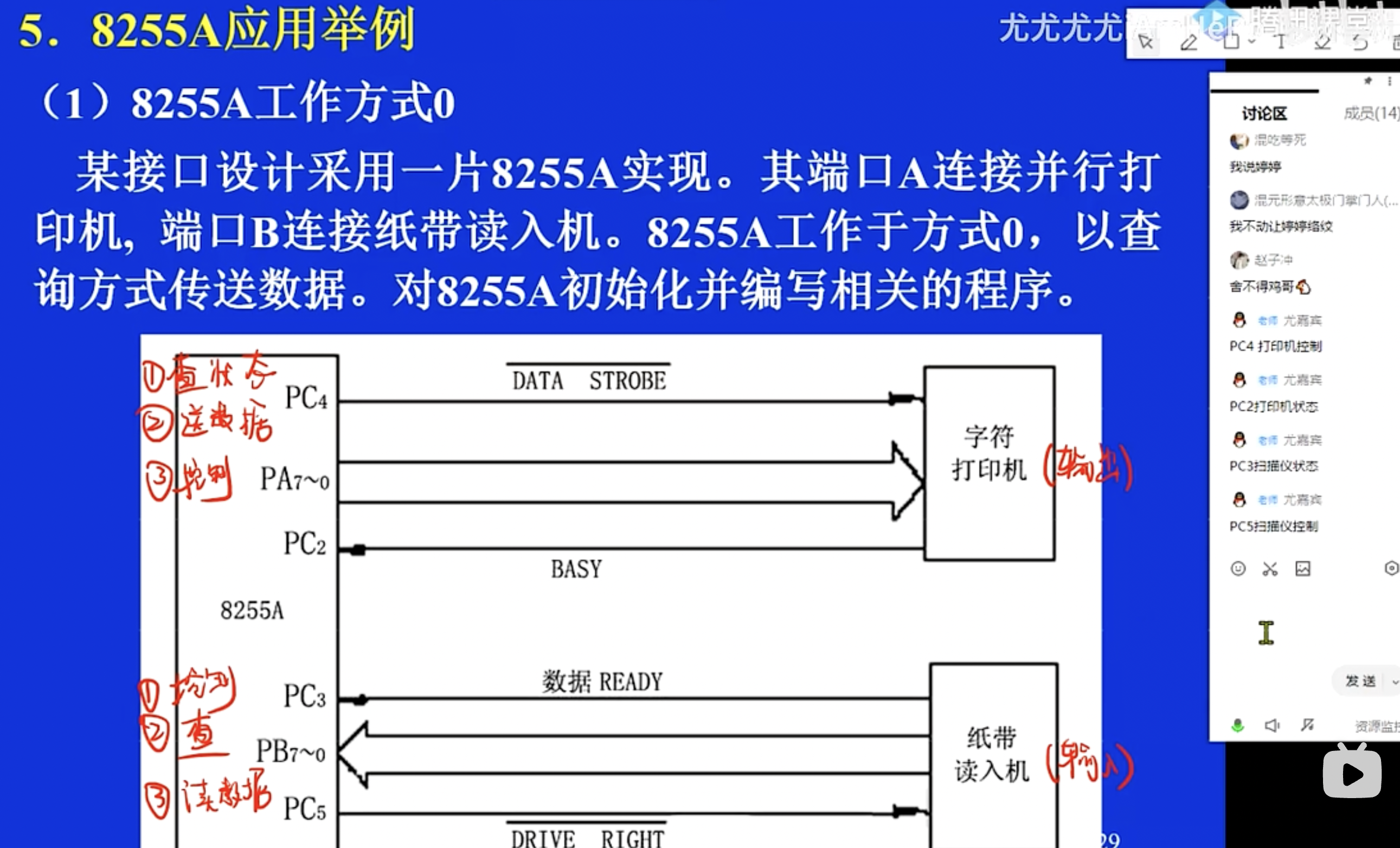
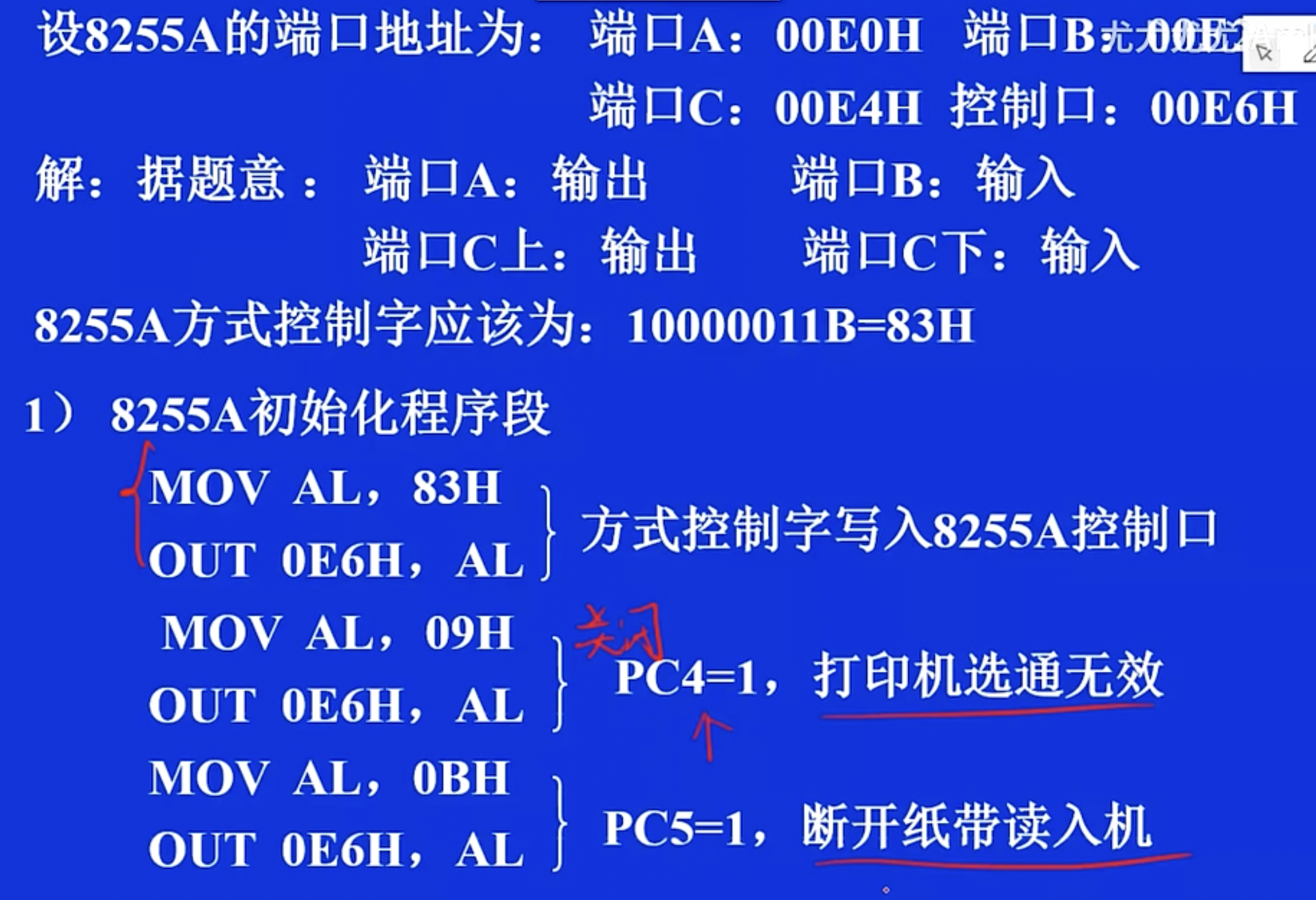
初始化程序段:
MOV AL,83H
OUT 0E6H,AL;方式控制字写入8255A控制口
MOV AL,09H;PC4置1
OUT 0E6H,AL;使PC4=1,关闭打印机
MOV AL,0BH;PC5置1
OUT 0E6H,AL;使PC5=1,断开读入机
假设需打印的字符存放于CL中。
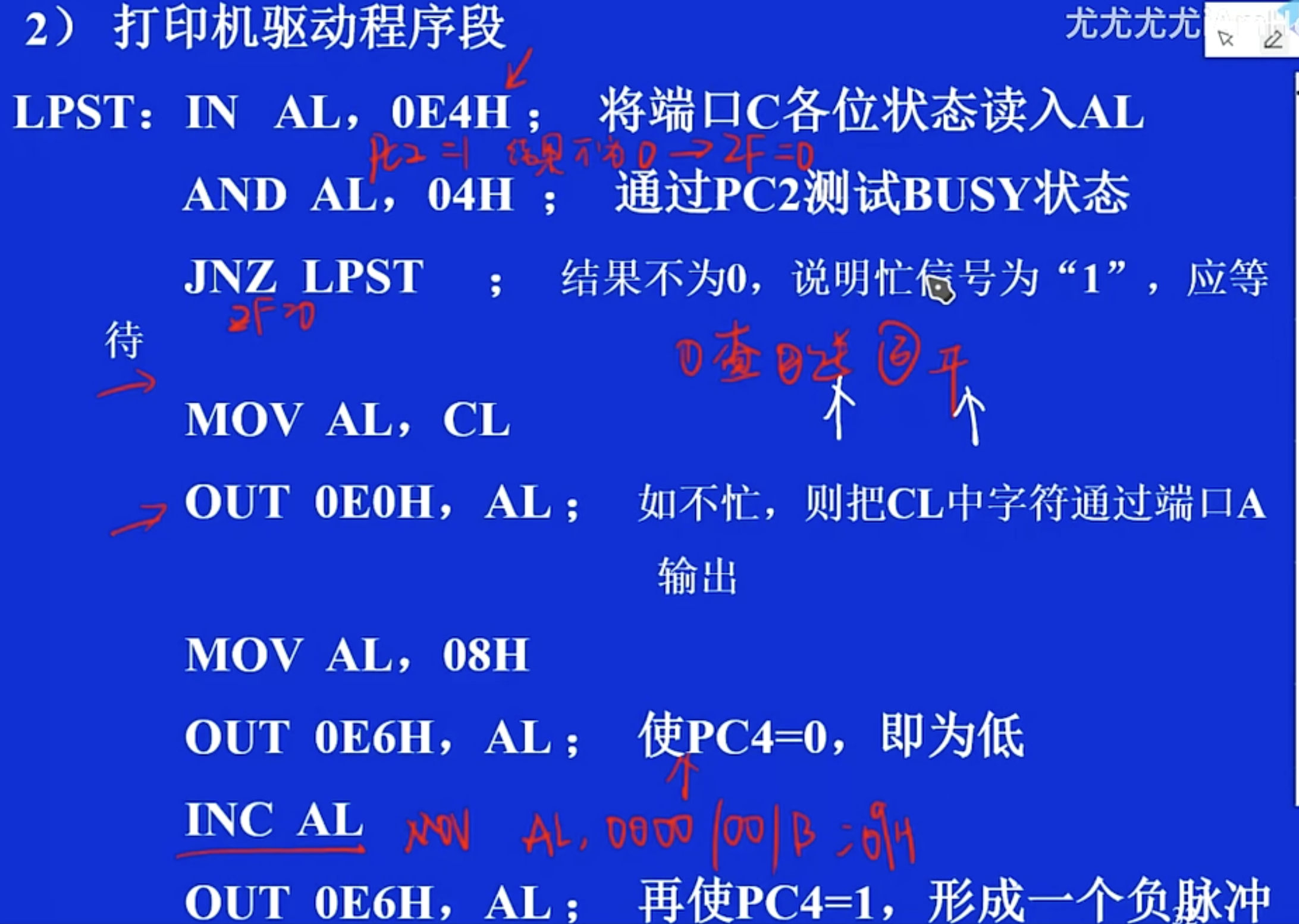
打印机驱动程序段:
第一步:查
LPST:IN AL,0E4H;将端口C各位状态读入AL
AND AL,04H;通过PC2测试状态
JNZ LPST;若PC2=0得出ZF=1顺序执行,ZF=0说明在忙继续循环
第二步:送数据
MOV AL,CL
OUT 0E0H,AL;把CL中的字符通过端口A输出
第三步:控制(开)
MOV AL,08H
OUT 0E6H,AL;使PC4=0,即低电平,打开打印机
INC AL;INC为加1指令,这里的目的是关闭打印机也可以使用MOV AL,0000 1001B来完成
OUT 0E6H,AL;再使PC4=1,形成一个负脉冲
为什么不是先开启再送数据?因为8255有锁存功能,锁存数据,输出锁存。如果先开启再送数据,送入的数据是上一次在8255中已经存放的数据,所以要更新锁存器的数据,更新的方法就是送入新的数据。
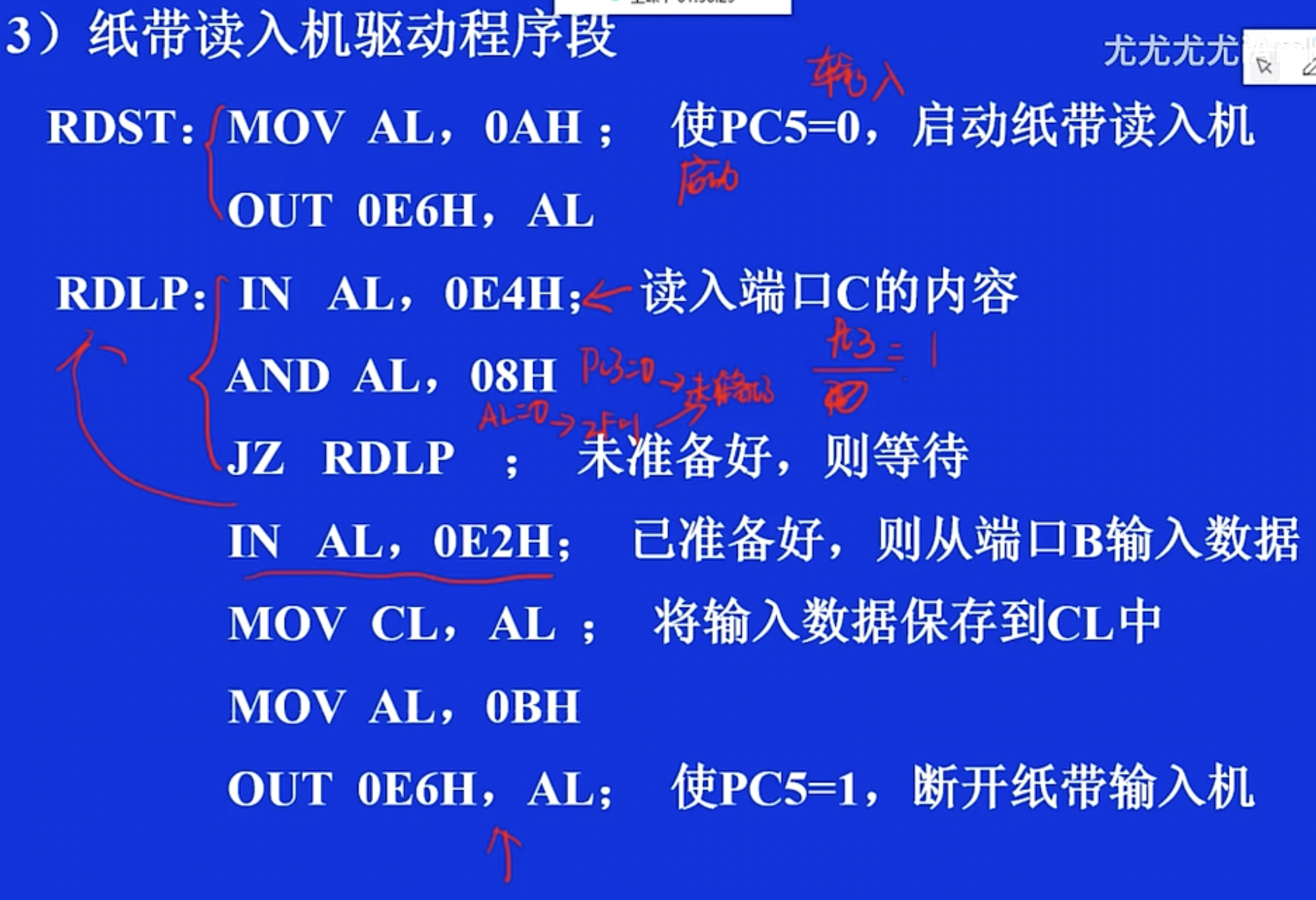
纸袋读入机驱动程序段:
第一步:控制
RDST:MOV AL,0AH;使PC5=0,启动读入机
OUT 0E6H,AL
第二步:查
因为图中为READY说明只有PC3=‘1’时才是准备好
RDLP:IN AL,0E4H;读入端口C的内容
AND AL,08H;通过PC3测试状态,当PC3=0那么AL=0,ZF=1说明未准备好
JZ RDLP;当PC3=1,AL=1,ZF=0时顺序执行,否则循环跳转
第三步:读数据
IN AL,0E2H;从端口B输入数据
MOV CL,AL;将输入数据保存到CL中
MOV AL,0BH
OUT 0E6H,AL;使PC5=1,断开读入机
中断向量表例题
设置中断矢量
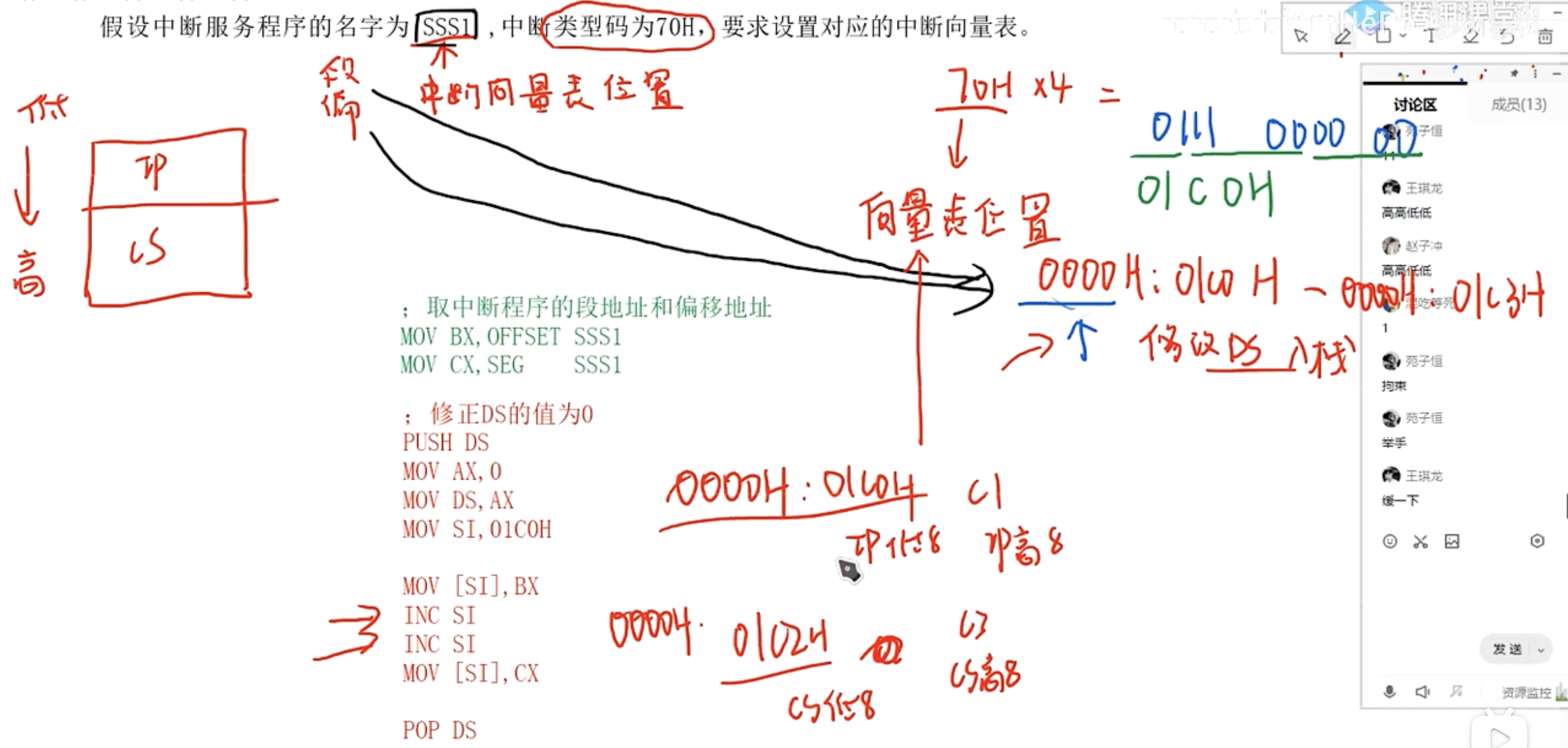
取中断程序的段地址和偏移地址:
MOV BX,OFFSET SSS1;OFFSET偏移地址
MOV CX,SEG SSS1;SEG段地址
修正DS的值为0:
PUSH DS;入栈,保护DS的数据
MOV AX,0
MOV DS,AX
MOV SI,01C0H;修正好以后,存取偏移地址就变成了0000H:01C0H,对应向量表位置
存取偏移地址的原因可能是:DS寄存器,通常用来存放要访问数据的段地址。
放入入口地址:
MOV [SI],BX
MOV [SI+2],CX
DS不变,弹出(恢复)DS:
POP DS
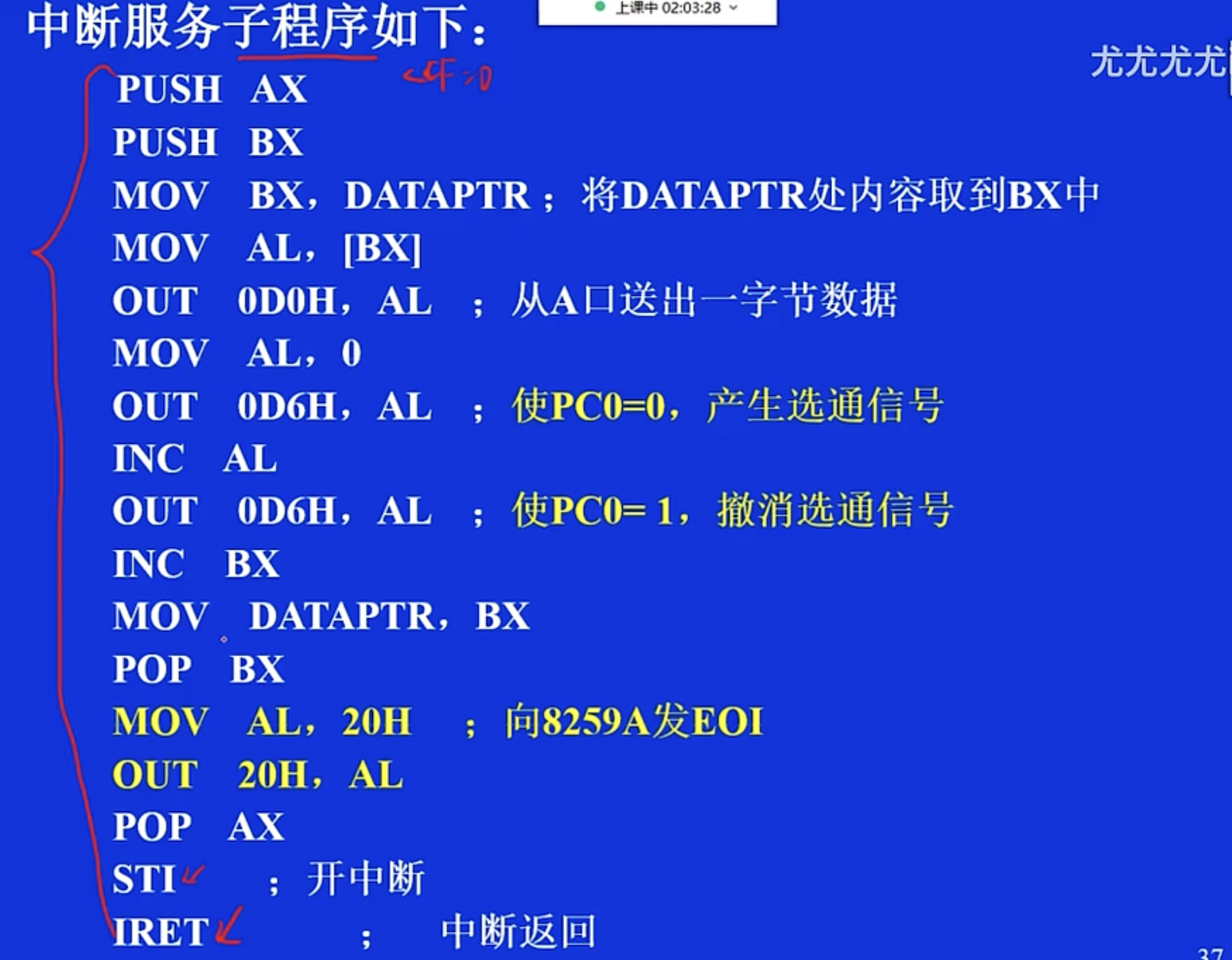
中断服务子程序
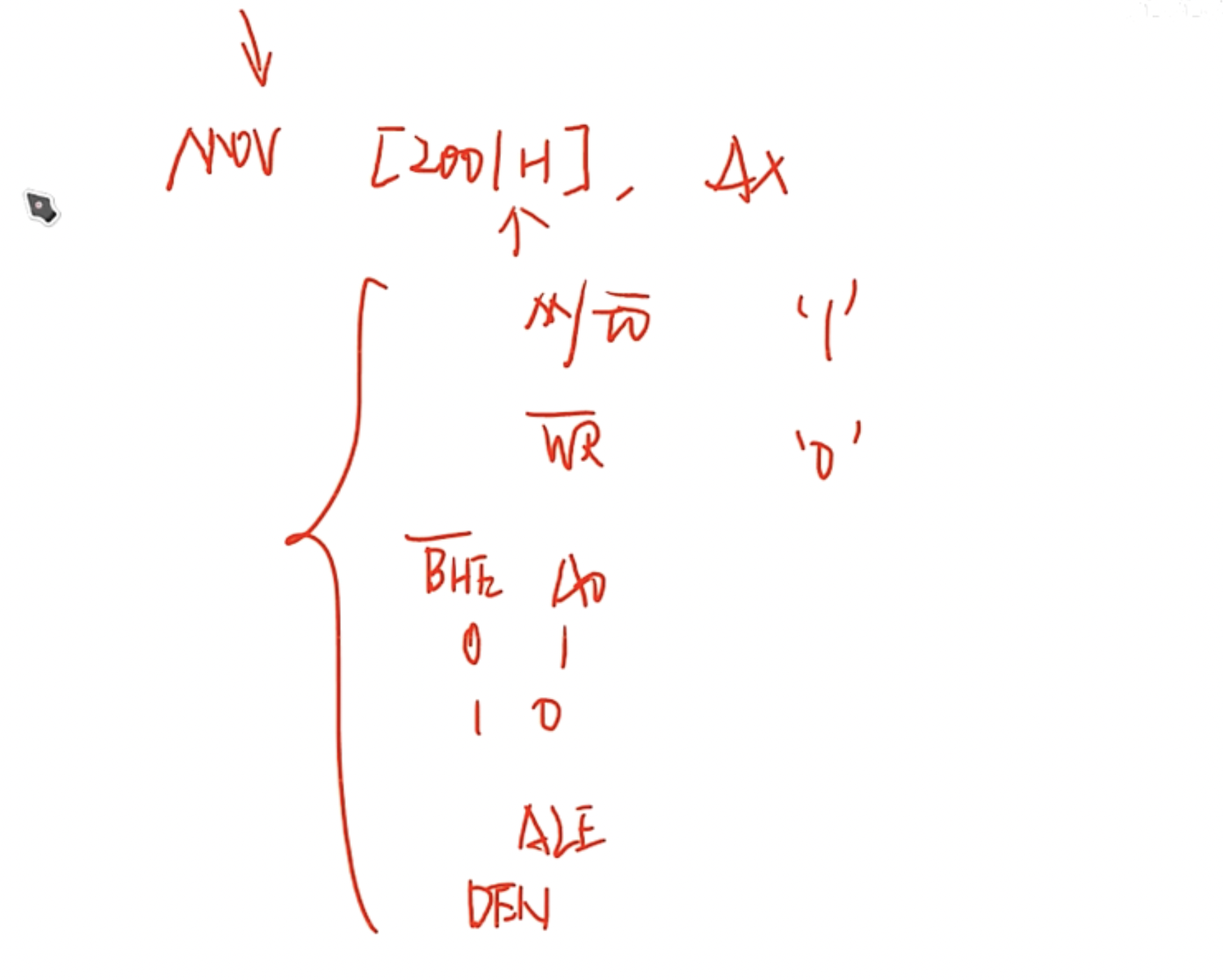
执行一条指令
其实有很多引脚都在工作
这就是微机原理。
硬件软件相结合。
2023.12.02